
#2 EXPANSION OF DYNAMIC RANGE
WHAT IS DYNAMIC RANGE?
Dynamic Range, DR, for a stereo, is the difference between the loudest and smallest sound that the
system can reproduce. For human hearing, DR is about 120dB, with OdB being the smallest audible
sound and 120dB being very loud. The scale is logarithmic, each 10dB = ten times, so 120dB =
100,000,000,000 times; which presents immense engineering challenges.
Early in High Fidelity, the Long Playing record achieved a DR of 75dB, on a good day. The signal
source was electromechanical, with stylus deflection being the analog of amplitude, which set the
upper limit. So a chain of components ending in a pair of speakers that could manage 75dB could
(possibly) reproduce the DR on the LP. As an industry, we did a good job at this.
When the CD came along, the upper limit for DR was bumped to 103dB, that limit being set by the
16 bit word standard. Wow! From 75 yo 103dB! That was huge! Nearly 30dB, so nearly 1000 times.
That upset the applecart. I was there, building speakers. It was a stretch. Some guys did OK, many
did not; their product was noticeably lifeless by comparison. The point then was: conventional tech
barely made the cut, with some effort.
Today, HD’s 24 bit enables DR that surpasses that of human hearing, meaning that it is finally
possible for recorded music to have ideal DR. The recording guys can capture it, but can we
playback guys transduce it? Can we possibly wring another 15dB out of conventional tech? Nope.
Ain’t gonna happen. Can’t.
The proof is out in the open. When you hear guys saying that they don’t hear much difference in the
dynamics between CD and HD, they’re right! But not for the reason they think. The bottleneck is not
on the recording side, it’s on the playback side. Their speakers are not dynamically capable AND
their passive filters are obliterating the improvement in resolution.
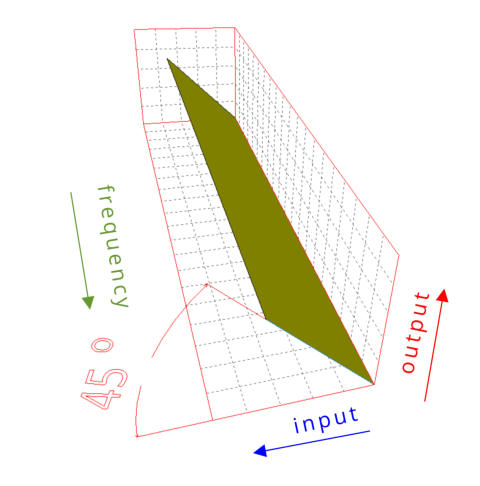
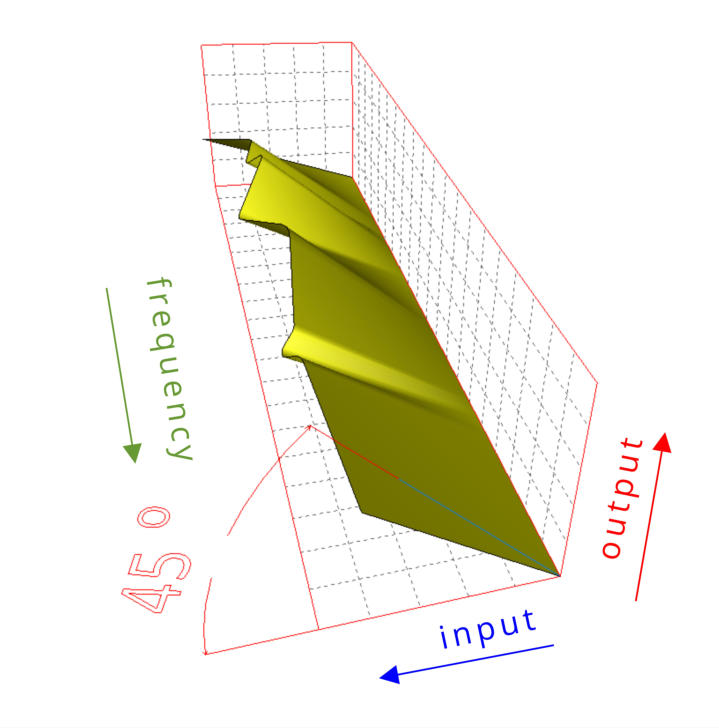
Let’s take a look inside DR reproduction in the speaker. A speaker’s job it is to transduce an
electronic time/voltage signal into time/sound pressure in your room. Perfect Dynamic Linearity
means that: for each doubling of the input, you’ll see a doubling of the output, across the entire
audio band.
Here’s a 3D graph
showing what
perfect Dynamic
Linearity in a
speaker would look
like.
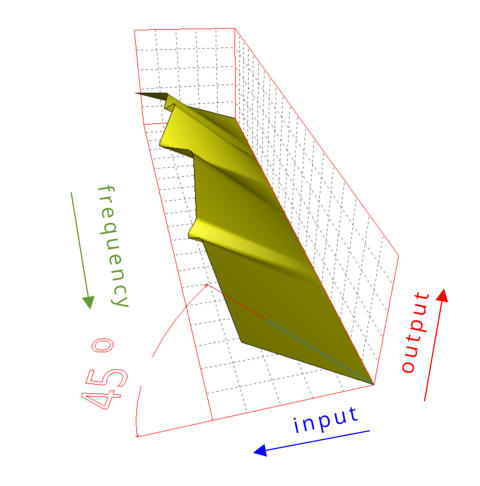
But what actually
happens is
something less
than ideal. Instead
of a 1: 1
relationship
between input and
output, you get
something less.
And the
shortcomings are
typically not evenly
distributed across
the audio band. In
most cases the
woofer gives up
first; it can’t keep
up with the rising
outputs of the
midrange and
tweeter. No,
surprise, really, its
job is much harder.
This is the reason
why so many
systems “glare”
when you crank
them: the tonal
balance is shifting
upwards. I’m sure
you’ve noticed that
the frequency
/amplitude curves
presented to you in
the specs and
magazines are
taken at modest
levels. No
indictment, here,
it’s very difficult to
measure, in room, at high pressures. But you should know what’s going on; you should not expect
that a “pretty” freq/amplitude curve will still be so at high amplitudes.
WHAT’S CAUSING IMPERFECT DR AT THE WOOFER?
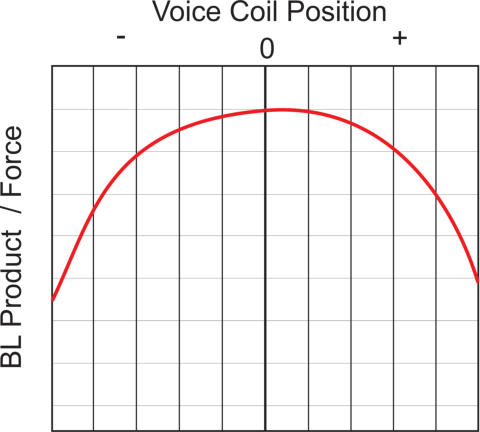
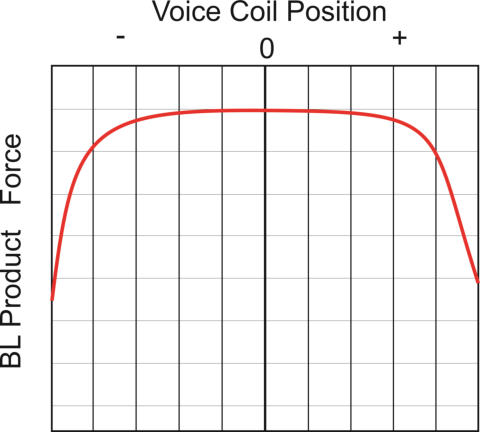
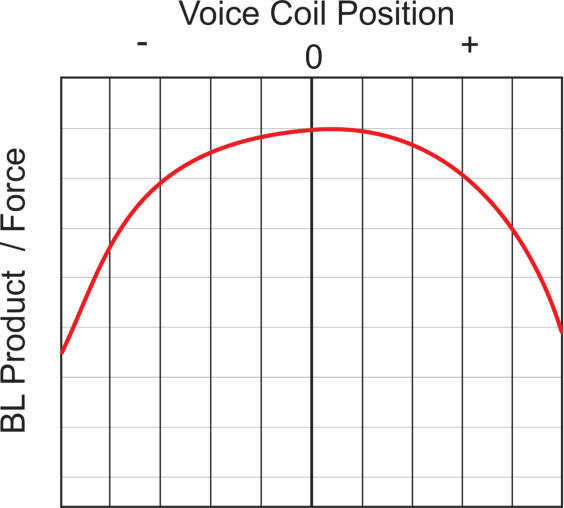
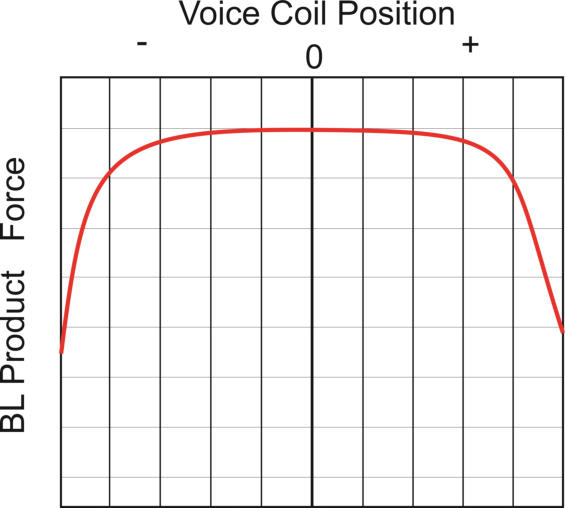
#1 - The motor itself is nonlinear.
Motor force at the cone falls off on
both sides of center position. This
happens for two reasons: as the
voice coil moves fore and aft, more
and more of it moves outside the
magnetic gap, so the force
generated falls off. And a less-than-
perfectly elastic suspension
‘tightens’ as the moving system
excurds, mechanically limiting it.
This problem is even worse than it
looks because the two performance
functions that we want most are
governed by adverse square
functions. Bear with me, please.
First, because your perceptions are logarithmic, each time you want the system to sound twice as
loud, you actually need it to play four times as loud, so four times the excursion.
Plus, each time you ask for lower bass, let’s say you’d like to go from 40Hz to 20Hz, halving the
frequency, you’ll need four times the excursion.
So, as you ask your system to play some combination of bass heavy music and nice amplitude, you
are actually demanding huge amounts of excursion. That’s why your woofers bottom out. The
critical point, here, is that the greater the percentage of time the coil is in the declining force zones,
the less faithful it is to the signal’s DR across the entire range of the woofer. That’s why you hear
‘congestion’ on difficult music, which is not as evident on simpler tunes.
What you’d like to see, and happily
pay for, is motor behavior that looks
more like the second plot. A few of
today’s best makers of cutting edge
woofers are taking special care on
this aspect, knowing that customers,
like me, are discerning.
(Has anyone ever told you this
before? No? Because they don’t
know it, themselves.)
#2 - Thermal compression drags
down output, an effect that,
unfortunately, sums with
force/position effect.
As you demand more from a woofer,
in addition to causing more excursion, you are also pushing more current thru the voice coil. So it
gets hot. Law of nature: heat generated is a square function of of current, so the effect come on
quickly. Problem? Yes. Resistance rises linearly with temperature. As the coil warms, the resistance
rises. Remember the woofer in series with the resistor (in section one)? Lower output, higher Q,
loss of amp damping. But it’s worse: like the coils in your toaster (which are supposed to get hot)
the rise time and cool-off times are slow. So when you punch a bunch of current thru your coil, the
hotter it gets, the more the output falls. It takes a few milliseconds to hurt you, then the effects
linger. As distortions go, this one is an real mess.
What can we do about it? Two things are obvious: keep the coils cool and to spread the heat out
among multiple woofers, thus multiple coils.
Examine these two Satori woofers, a 9.5” and a 7.5”. You can see the heroic means of keeping the
voice coil temperatures down. First, oversized coils spread the heat out and increase the radiating
area. All things being equal, a larger coil would also spread out the magnetic flux that motivates it.
So, by increasing the coil size, we do need to ramp up the magnetic circuit, and exponentially. So it
gets expensive. Then, generous venting thru the pole piece, thru the center of the coil with both
ends flared for smoother and quieter flow, a symmetrical spider that fully exposes the forward end
of the coil and a perforated coil former form a system that effectively pumps cool air across the
coil. Implicit in this thermal design is an extremely coercive neodymium boron drive system that
focuses an intense magnetic field across the voice coil, raising sensitivity, so requiring less current.
As you will see, one of the advantages that Next Gen tech brings is the ability to put more drivers
into less space. So we can go ahead and pack baffle with woofers, which both beneficial to the
system’s output/bandwidth envelope because they can do more work, but also to DR.
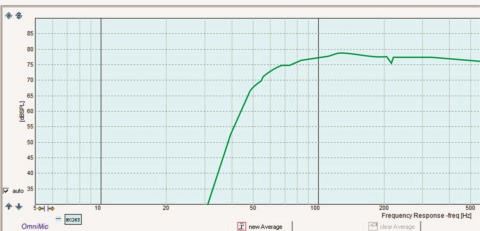
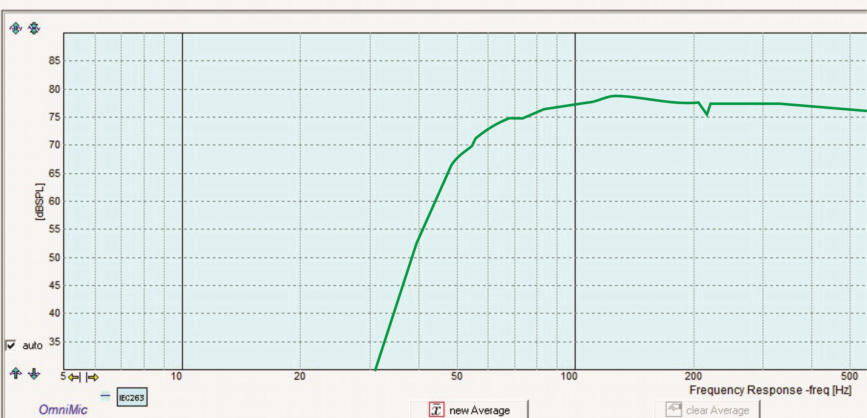
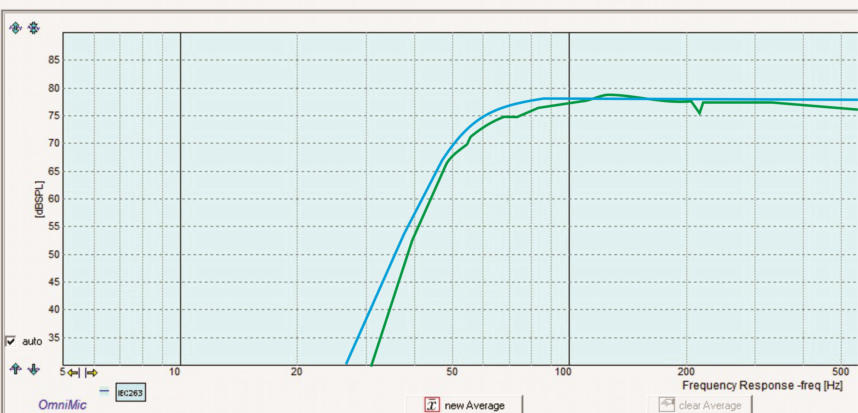
Completing the strategy for keeping both temps and excursion low is a DSP “trick” that results in
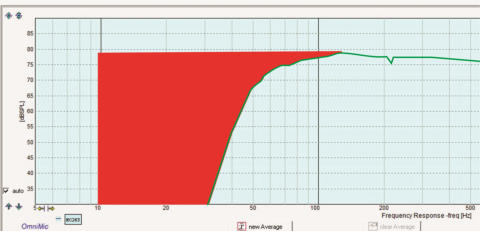
less current at the coil and less demand for excursion. Every bass system has a natural low
frequency roll-off; a region where it can make little useful output.
For all of these years, in conventional systems, we been sending full range signal into that region
(shown in red), both heating it and forcing useless excursion.
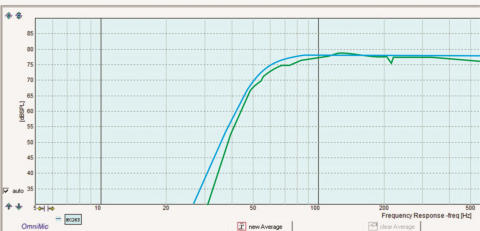
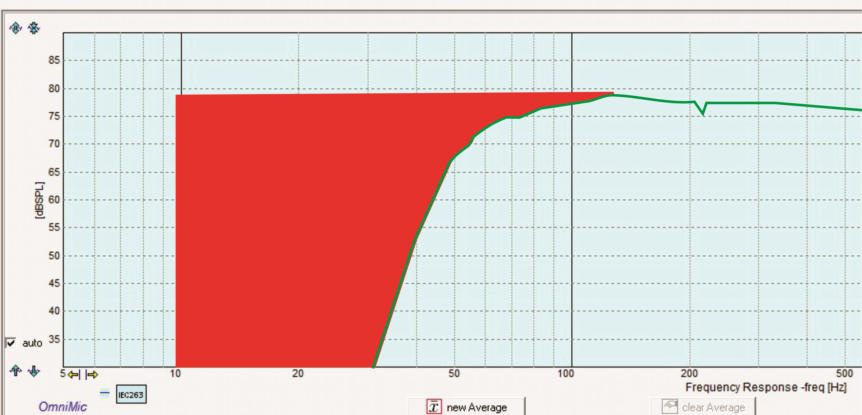
We can’t do this with passive filters, but the idea is simple, in the processor we filter out the
unwanted energy but just fitting a high pass filter to the acoustic output; the blue line shows the
filter. This approach cleans up the working part of the band and improves DR greatly because it
both helps keep the coil cool by reducing total current flow, plus eliminates unproductive excursion.
This is a rarity in engineering: all upside, no downside. A free lunch!
To recap: multiple advanced woofers designed for motor force linearity and coil cooling, plus a high
pass filter. It sounds simple, now that we understand it, no?





#2 EXPANSION OF DYNAMIC RANGE
WHAT IS DYNAMIC RANGE?
Dynamic Range, DR, for a stereo, is the
difference between the loudest and smallest
sound that the system can reproduce. For
human hearing, DR is about 120dB, with OdB
being the smallest audible sound and 120dB
being very loud. The scale is logarithmic, each
10dB = ten times, so 120dB = 100,000,000,000
times; which presents immense engineering
challenges.
Early in High Fidelity, the Long Playing record
achieved a DR of 75dB, on a good day. The signal
source was electromechanical, with stylus
deflection being the analog of amplitude, which
set the upper limit. So a chain of components
ending in a pair of speakers that could manage
75dB could (possibly) reproduce the DR on the
LP. As an industry, we did a good job at this.
When the CD came along, the upper limit for DR
was bumped to 103dB, that limit being set by
the 16 bit word standard. Wow! From 75 yo
103dB! That was huge! Nearly 30dB, so nearly
1000 times. That upset the applecart. I was
there, building speakers. It was a stretch. Some
guys did OK, many did not; their product was
noticeably lifeless by comparison. The point
then was: conventional tech barely made the
cut, with some effort.
Today, HD’s 24 bit enables DR that surpasses
that of human hearing, meaning that it is finally
possible for recorded music to have ideal DR.
The recording guys can capture it, but can we
playback guys transduce it? Can we possibly
wring another 15dB out of conventional tech?
Nope. Ain’t gonna happen. Can’t.
The proof is out in the open. When you hear
guys saying that they don’t hear much
difference in the dynamics between CD and HD,
they’re right! But not for the reason they think.
The bottleneck is not on the recording side, it’s
on the playback side. Their speakers are not
dynamically capable AND their passive filters
are obliterating the improvement in resolution.
Let’s take a look inside DR reproduction in the
speaker. A speaker’s job it is to transduce an
electronic time/voltage signal into time/sound
pressure in your room. Perfect Dynamic
Linearity means that: for each doubling of the
input, you’ll see a doubling of the output, across
the entire audio band.
Here’s a 3D graph showing what perfect
Dynamic Linearity in a speaker would look like.
But what actually happens is something less
than ideal. Instead of a 1: 1 relationship
between input and output, you get something
less.
And the shortcomings are typically not evenly
distributed across the audio band. In most cases
the woofer gives up first; it can’t keep up with
the rising outputs of the midrange and tweeter.
No, surprise, really, its job is much harder. This
is the reason why so many systems “glare” when
you crank them: the tonal balance is shifting
upwards. I’m sure you’ve noticed that the
frequency/amplitude curves presented to you in
the specs and magazines are taken at modest
levels. No indictment, here, it’s very difficult to
measure, in room, at high pressures. But you
should know what’s going on; you should not
expect that a “pretty” freq/amplitude curve will
still be so at high amplitudes.
WHAT’S CAUSING IMPERFECT DR AT THE
WOOFER?
#1 - The motor itself is nonlinear. Motor force at
the cone falls off on both sides of center
position. This happens for two reasons: as the
voice coil moves fore and aft, more and more of
it moves outside the magnetic gap, so the force
generated falls off. And a less-than-perfectly
elastic suspension ‘tightens’ as the moving
system excurds, mechanically limiting it.
This problem is even worse than it looks
because the two performance functions that we
want most are governed by adverse square
functions. Bear with me, please. First, because
your perceptions are logarithmic, each time you
want the system to sound twice as loud, you
actually need it to play four times as loud, so
four times the excursion.
Plus, each time you ask for lower bass, let’s say
you’d like to go from 40Hz to 20Hz, halving the
frequency, you’ll need four times the excursion.
So, as you ask your system to play some
combination of bass heavy music and nice
amplitude, you are actually demanding huge
amounts of excursion. That’s why your woofers
bottom out. The critical point, here, is that the
greater the percentage of time the coil is in the
declining force zones, the less faithful it is to the
signal’s DR across the entire range of the woofer.
That’s why you hear ‘congestion’ on difficult
music, which is not as evident on simpler tunes.
What you’d like to see, and happily pay for, is
motor behavior that looks more like the second
plot. A few of today’s best makers of cutting
edge woofers are taking special care on this
aspect, knowing that customers, like me, are
discerning.
(Has anyone ever told you this before? No?
Because they don’t know it, themselves.)
#2 - Thermal compression drags down output,an
effect that, unfortunately, sums with the
force/position effect.
As you demand more from a woofer, in addition
to causing more excursion, you are also pushing
more current thru the voice coil. So it gets hot.
Law of nature: heat generated is a square
function of of current, so the effect come on
quickly. Problem? Yes. Resistance rises linearly
with temperature. As the coil warms, the
resistance rises. Remember the woofer in series
with the resistor (in section one)? Lower output,
higher Q, loss of amp damping. But it’s worse:
like the coils in your toaster (which are
supposed to get hot) the rise time and cool-off
times are slow. So when you punch a bunch of
current thru your coil, the hotter it gets, the
more the output falls. It takes a few milliseconds
to hurt you, then the effects linger. As
distortions go, this one is an real mess.
What can we do about it? Two things are
obvious: keep the coils cool and to spread the
heat out among multiple woofers, thus multiple
coils.
Examine these two Satori woofers, a 9.5” and a
7.5”. You can see the heroic means of keeping
the voice coil temperatures down. First,
oversized coils spread the heat out and increase
the radiating area. All things being equal, a
larger coil would also spread out the magnetic
flux that motivates it. So, by increasing the coil
size, we do need to ramp up the magnetic
circuit, and exponentially. So it gets expensive.
Then, generous venting thru the pole piece, thru
the center of the coil with both ends flared for
smoother and quieter flow, a symmetrical
spider that fully exposes the forward end of the
coil and a perforated coil former form a system
that effectively pumps cool air across the coil.
Implicit in this thermal design is an extremely
coercive neodymium boron drive system that
focuses an intense magnetic field across the
voice coil, raising sensitivity, so requiring less
current.
As you will see, one of the advantages that Next
Gen tech brings is the ability to put more drivers
into less space. So we can go ahead and pack
baffle with woofers, which both beneficial to the
system’s output/bandwidth envelope because
they can do more work, but also to DR.
Completing the strategy for keeping both temps
and excursion low is a DSP “trick” that results in
less current at the coil and less demand for
excursion. Every bass system has a natural low
frequency roll-off; a region where it can make
little useful output.
For all of these years, in conventional systems,
we been sending full range signal into that
region (shown in red), both heating it and
forcing useless excursion.
We can’t do this with passive filters, but the idea
is simple, in the processor we filter out the
unwanted energy but just fitting a high pass
filter to the acoustic output; the blue line shows
the filter. This approach cleans up the working
part of the band and improves DR greatly
because it both helps keep the coil cool by
reducing total current flow, plus eliminates
unproductive excursion. This is a rarity in
engineering: all upside, no downside. A free
lunch!
To recap: multiple advanced woofers designed
for motor force linearity and coil cooling, plus a
high pass filter. It sounds simple, now that we
understand it, no?